






Reaction wheel for satellite and CubeSat
-
Space
-
Small satellite, CubeSat
Feb. 22, 2023
What is a reaction wheel?
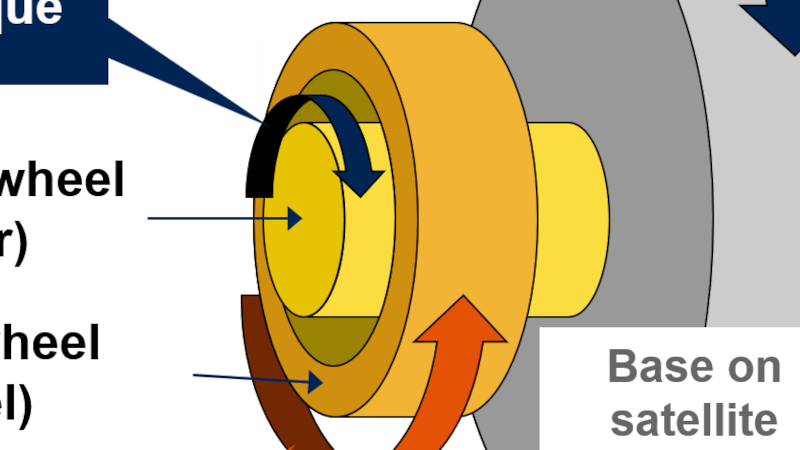
A reaction wheel is a component used to control the attitude of a satellite by changing its direction. It is a type of electric actuator that generates angular momentum by the reaction torque applied to the flywheel.
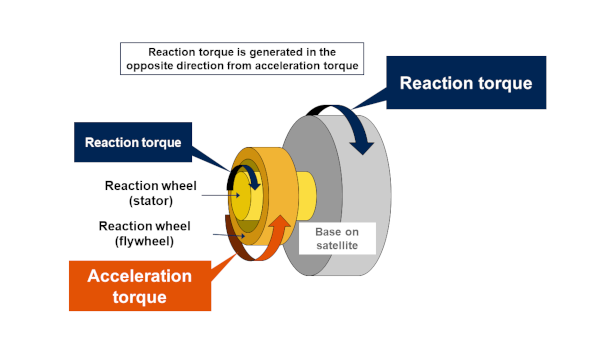 Behavior of reaction wheel
Behavior of reaction wheel
Unlike a fuel-consuming thruster, attitude control is possible only with electrical energy, and if power is provided by solar cells, etc., driving power can be secured for a long time. Since it does not require fuel, it has an advantage over thrusters in satellites operated independently for a long time in space.
However, the reaction wheel can only be controlled to rotate the satellite by this mechanism, not to apply linear acceleration. There is also an upper limit to the angular momentum that can be accumulated, which must be complemented by other attitude control devices such as thrusters and magnetic torquers.
Satellites need to have at least three reaction wheels for three-axis (X, Y, Z) control, but it is common to have four for redundancy so that they do not lose function if one fails. Therefore, they are required to be small, lightweight, and have high angular momentum. In addition, as the performance of observation equipment mounted on satellites continues to improve, there is a strong need for low vibration (low disturbance), because the vibration (disturbance) generated by the reaction wheel causes the performance of observation equipment to deteriorate.
Structure of the reaction wheel
The reaction wheel has a structure in which one flywheel (a disk-shaped flywheel) is rotationally driven by an electric motor (a brushless DC motor) with respect to one rotating shaft. The flywheel is made as one unit with the electric motor.
 Appearance of ASPINA's reaction wheel for CubeSat
Appearance of ASPINA's reaction wheel for CubeSat
Flywheel
A flywheel is a rotor that rotates around a shaft. To increase the performance of angular momentum, the mass should be concentrated in the outer periphery where the radius of rotation is large, while the inner periphery where the radius of rotation is small should be lighter.
Bearing
The bearing supports the flywheel and allows it to rotate with minimal friction. The flywheel uses low-friction ball bearings with high precision, stability, and space environment resistance.
Motor
The motor provides the torque needed to turn the wheel. A brushless DC (BLDC) motor is used to reduce vibration. To achieve small size and large angular momentum, a high-speed, high-efficiency motor is used.
Control electronics
Control electronics are used to adjust the speed of the wheels and communicate with the satellite's Guidance, Navigation, and Control (GNC) system. These include power electronics, digital controllers, and other components needed to operate the reaction wheel.
Housing
The housing houses wheel assemblies, bearings, motors, and control electronics. It is usually made of lightweight materials such as aluminum or composites to minimize mass and protect internal components.
Classification of satellites and reaction wheel specification
Satellites are generally classified by the weight.
| Weight of the satellite | Classification name |
|---|---|
| 0.01 to 0.09kg | Femto |
| 0.1 to 1kg | Pico |
| 1.1 to 10kg | Nano |
| 11 to 200kg | Micro |
| 201 to 600kg | Mini |
(The classification of satellites may vary depending on the literature.)
One of the biggest categories of growth in recent years is the Nano-Micro size satellites.
Satellites in this size range are commonly referred to as CubeSats, which defines 1U as a cubical shape measuring 10 x 10 x 10cm with a mass of 1 to 50kg. A CubeSat is a satellite that typically combine multiple 1U modules into 3U, 6U, and 12U sizes. The modular design philosophy lends itself to rapid development and launch at a low cost.
The reaction wheels used on those satellites also need to have the right specs for their size.
The angular momentum required is roughly as follows:
| Size of satellite | Weight of satellite | Angular momentum of reaction wheel |
|---|---|---|
| CubeSat | 1 to 50kg | 1.0 to 100mNms (Rough standard) |
| MicroSat | 100kg class | 0.1 to 0.8Nms (Rough standard) |
| MiniSat | 200kg class | 0.9 to 4.0Nms (Rough standard) |
In addition to angular momentum, torque and power consumption of reaction wheels should be selected for each satellite.
ASPINA is developing reaction wheels for small satellites/CubeSats
ASPINA is currently developing reaction wheels to meet the needs of small satellites and CubeSats.
Feel free to reach out to us for detailed information or pricing.
Related information




Contact us for more information
- New inquiry
- Prototype
- Upgrade
- Customization
- Your spec
- Literature
- Support
- Others